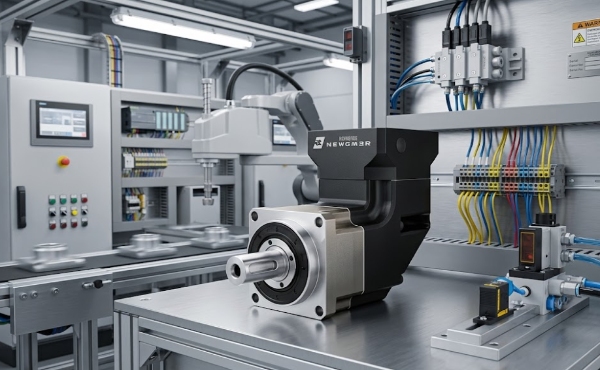
Der weltweite Vorstoß in Richtung fortschrittlicher industrieller Automatisierung, kollaborativer Roboter mit hoher Nutzlast (Cobots), chirurgischer medizinischer Arme und mehrachsiger Verteidigungssysteme stellt extreme Anforderungen an elektromechanische Aktuatoren. Herkömmliche verpackte Servomotoren führen häufig zu viel Volumen, Übergewicht und mechanischer Nachgiebigkeit bei den Gelenkkonstruktionen. Um eine flüssige, drehmomentstarke Bewegung auf engstem Raum zu erreichen, greifen moderne Konstrukteure auf integrierte rahmenlose Drehmomentgelenkmotoren zurück .
Durch die direkte Einbettung von Stator und Rotor in das Strukturgehäuse der Maschine machen diese integrierten Kits unnötige Wellen, Lager und Kupplungen überflüssig. Um bei kompakten Verbindungen echte Präzision zu erreichen, ist jedoch weit mehr als nur eine grundlegende Integration erforderlich. Es erfordert eine fortschrittliche magnetische Abstimmung, eine präzise Feedback-Mechanik und eine optimierte Systemkonnektivität.

💡 Fortschrittliches magnetisches Design: Maximierung der Drehmomentdichte bei gleichzeitiger Reduzierung von Rastmomenten
Bei der präzisen Bewegungssteuerung wird die Leistung eines Motors häufig durch seine thermischen Grenzen und die inhärente magnetische Reibung begrenzt. Standardmotoren ohne Gehäuse leiden häufig unter starkem Rastmoment – periodische magnetische Anziehung zwischen den Rotormagneten und den Statorschlitzen – was die Positionierungsgenauigkeit bei langsamen Geschwindigkeiten beeinträchtigt.
Um diese Einschränkungen zu beseitigen, implementieren moderne Robotergelenke ein optimiertes Motorsteckplatzdesign. Durch die Berechnung der präzisen geometrischen Schräge der Statorschlitze oder die Verschiebung der Permanentmagnetanordnung auf dem Rotor können Ingenieure Rasteffekte deutlich reduzieren. Diese Konstruktion sorgt für eine bemerkenswert hohe Drehmomentdichte und gewährleistet eine maximale Drehmomentabgabe pro Volumeneinheit bei gleichzeitig gleichmäßiger Rotation.
● Hervorragende Steuerung bei niedrigen Geschwindigkeiten: Dank dieser optimierten magnetischen Architektur behält das System die präzise Steuerung bei niedrigen Geschwindigkeiten bei. Es eliminiert die Stick-Slip-Probleme, die bei Konfigurationen mit Direktantrieb im unteren Preissegment häufig auftreten, was für hochpräzises Schweißen, Mikromontage und empfindliche chirurgische Anwendungen von entscheidender Bedeutung ist.
● Geringe Vibrationen und geräuschloser Betrieb:Diese strukturelle Abstimmung gewährleistet eine schnelle Reaktion, stabilen Betrieb, geringe Vibrationen und geringe Geräuschentwicklung. Die Eliminierung hochfrequenter akustischer Resonanzen ist besonders wichtig für medizinische Operationssäle und kollaborative Reinraumarbeitsbereiche.
🛠️ Mechanische Kinematik: Integration hochpräziser Planetengetriebe
Ein rahmenloser Motorsatz liefert ein reines elektromagnetisches Drehmoment, aber um diese Leistung in nutzbare Robotergelenke umzuwandeln, ist ein leistungsstarkes Geschwindigkeitsreduzierungssystem erforderlich. Die Integration eines hochpräzisen Planetengetriebes mit fortschrittlichen Schrägverzahnungsprofilen bietet eine äußerst kompakte, robuste Lösung.
Kalibrierung mit extrem geringem Spiel: Bei handelsüblichen Getrieben kommt es zu erheblichem Spiel, was die Wiederholgenauigkeit der Position beeinträchtigt. Integrierte Premium-Verbindungen zeichnen sich durch eine Zahnfußrundheit von weniger als 3 Bogenminuten aus. Diese enge geometrische Toleranz garantiert eine hervorragende Torsionssteifigkeit und minimiert Bewegungsverluste bei bidirektionalen Zyklen.
Schnelle Richtungsumkehr: Die geringe Trägheit des rahmenlosen Rotors, gepaart mit der präzisen Passung der schrägverzahnten Planetenräder, ermöglicht eine schnelle Richtungsumkehr des Motors. Der Aktuator kann unter hoher Last sofort schwenken, ohne mechanische Stöße auszulösen oder den Antriebsstrang zu belasten.


🏢 Closed-Loop Intelligence: Der Betätigungsstandard der iHF-Gruppe
Für Hersteller von Industrierobotern und Integratoren von Automatisierungssystemen stellt die Montage separater Statoren, Rotoren, Wellgetriebe und Encoder verschiedener Anbieter einen frustrierenden Fertigungsengpass dar. Inkompatibilitäten zwischen Komponenten führen häufig zu Signalverzögerungen, Problemen mit der Wärmeausdehnung und komplexen Kalibrierungsverfahren.
Um diese Branchenherausforderungen zu lösen, hat die iHF Group eine vollständig integrierte, leistungsstarke modulare Verbindungslösung entwickelt. Durch die Kombination präziser Direktantriebstechnologie mit fortschrittlicher Feedback-Hardware liefern die Systeme der iHF Group eine unübertroffene Direktantriebsleistung direkt nach dem Auspacken.
⚙️ Echte Multi-Variable-Regelung mit geschlossenem Regelkreis: Die Steuerungen der iHF-Gruppe ermöglichen eine vollständige, deterministische Regelung mit geschlossenem Regelkreis für Drehmoment, Geschwindigkeit und Position. Fortschrittliche Algorithmen der feldorientierten Regelung (FOC) verarbeiten aktuelle Profile in Echtzeit und verhindern so Spurfehler auch bei hochdynamischen Bewegungen.
📊 Dual-Encoder-Feedback-Architektur: Um Positionierungsfehler zu vermeiden, die durch physische Getriebedurchbiegung unter schweren Lasten verursacht werden, unterstützt das System Dual-Encoder, um die Genauigkeit der Feedback-Steuerung weiter zu verbessern. Ein hochauflösender Inkremental- oder Absolutwertgeber überwacht die schnelllaufende Motorwelle, während ein sekundärer Absolutwertgeber direkt das langsame Abtriebsgelenk überwacht. Dieser Aufbau misst und korrigiert kontinuierlich kleinere Mikroauslenkungen in Echtzeit.


🔌 Optimierte Systemtopographie: Daisy-Chain-Architektur
Da Robotersysteme weitere Achsen hinzufügen – etwa 7-Achsen-Cobots oder komplexe humanoide Strukturen –, wird die Verwaltung des internen Kabelbaums äußerst komplex. Das Verlegen dedizierter Strom- und Rückkopplungskabel von einem zentralen Schaltschrank durch jede einzelne Verbindung führt zu dicken Kabelbündeln, die die Gelenkbewegung einschränken und das Ausfallrisiko durch kontinuierliches Verdrehen erhöhen.
Moderne High-Density-Verbindungen überwinden dieses Problem, indem sie ein platzsparendes serielles Kommunikationslayout integrieren. Das System unterstützt die Daisy-Chain-Konfiguration mehrerer Einheiten und erleichtert so die Stromversorgung und Datenübertragung. Durch die Einbettung eines lokalisierten Mikroantriebs in jedes Gelenk können ein einzelner gemeinsamer DC-Strombus und ein industrielles Hochgeschwindigkeits-Ethernet-Kabel (wie EtherCAT oder CANopen) sequentiell von einem Gelenk zum nächsten geleitet werden. Dadurch wird das Gesamtgewicht des Kabels drastisch reduziert, die physische Verlegung vereinfacht und die Gesamtzuverlässigkeit des Systems verbessert.
❓ Technischer Deep Dive: Fragen und Antworten zur Branche
F1: Wie schützt ein Dual-Encoder-Setup vor mechanischem Verschleiß im Laufe der Zeit?
A: Wenn in einem System mit nur einem Encoder die Planetenräder im Laufe der Betriebsjahre geringfügigen Verschleiß oder Spiel ausgesetzt sind, erkennt die Steuerung den physikalischen Fehler am Abtriebsflansch nicht. Durch die Nutzung der Dual-Encoder-Unterstützung der iHF Group überwacht der sekundäre Encoder direkt die tatsächliche Werkzeugposition. Selbst wenn im Reduzierstück mechanischer Verschleiß auftritt, gleicht das geschlossene System die Abweichung automatisch aus und stellt sicher, dass Ihr Roboter während seiner gesamten Lebensdauer eine Präzision im Submillimeterbereich beibehält.
F2: Warum werden Schrägverzahnungen gegenüber Stirnrädern bei Gelenkanwendungen mit hohem Drehmoment bevorzugt?
A: Schrägverzahnungen verfügen über abgewinkelte Zahnlinien, die schrittweise und nicht auf einmal ineinandergreifen. Dieser progressive Zahnkontakt erhöht das Gesamtkontaktverhältnis erheblich und verteilt hohe mechanische Belastungen auf mehrere Zähne. Diese Anordnung ermöglicht direkt eine Zahnfußrundheit von weniger als 3 Bogenminuten, verringert akustische Geräusche und bietet die überlegene Torsionsfestigkeit, die für plötzliche Drehmomentspitzen erforderlich ist.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Angebot anfordern
Angebot anfordern